详情介绍
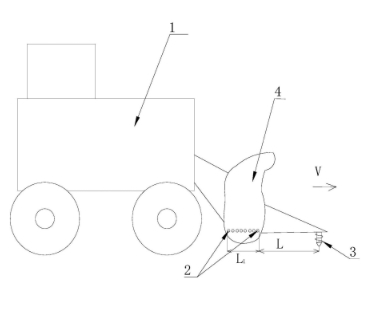
本发明属于采棉机控制领域,公开了一种采棉机地形智能自适应方法,所述的采棉车的采摘头上由前而后设置多排摘锭,所述的采摘头上设有用于检测采棉机前方地形的传感器,所述的方法为:当传感器检测到采棉机前方为上坡时,在T1秒后采摘头执行上升动作;其中,T1=(L‑X1)/V;当传感器检测到采棉机前方为下坡时,在T2秒后采摘头执行下降动作,T2=(L+L1+X2)/V。该方法能够有效避免采摘头与障碍物碰撞,且在遇到深坑时能够对植株进行有效的全面的棉花采摘。本方案也可以供其他类似结构的农用收割设备参考。
交易流程
安全保障
 关注公众号
关注公众号 浏览手机版
浏览手机版