详情介绍
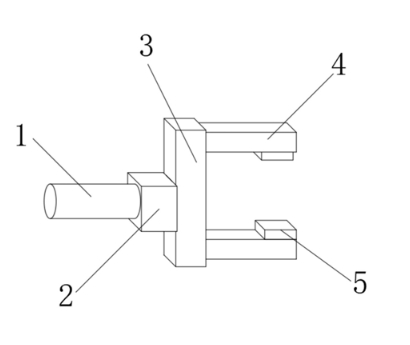
本实用新型涉及一种水下机器人专用机械臂,包括机械臂,所述机械臂的一侧与旋转外壳的一端固定连接,所述旋转外壳的另一端设置有夹紧装置;通过在机械臂内设置有第一电机,第一电机的输出端固定连接有固定杆,固定杆固定连接在旋转体的内侧,旋转体的外侧均匀设置有若干个滑块,滑块均转动连接于第一滑槽的内侧,第一滑槽固定连接在旋转外壳的内侧,通过第一电机的启动,能带动旋转体进行转动,旋转体的一侧又固定连接有夹紧装置,夹紧装置的一侧固定连接有夹具,通过第一电机的工作,即可带动夹具转动,带动夹具对不同角度,不同位置的物体进行夹取,能够更准确的进行夹取工作,本装置整体结构简单,适用性强。
交易流程
安全保障
 关注公众号
关注公众号 浏览手机版
浏览手机版