首页
产学研联盟“揭榜挂帅”
离岸创新中心
成果转化交易
产业引导基金
政策支持兑现
闲置资产交易
区间战略合作
智能制造
专利成果展示
平台首页
>
成果转化交易
>
专利成果展示
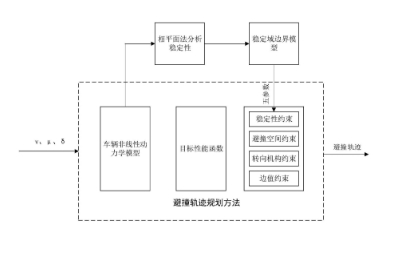
一种智能汽车紧急工况下避撞轨迹规划方法
行业领域:安全防护
需求类别:技术需求
法律状态:已下证
发布时间:2024-01-19
详情介绍
本发明公开了一种智能汽车紧急工况下避撞轨迹规划方法,以变道时间t、侧向加速度a
y
、转向角速度
三项性能指标构造目标函数,同时,基于稳定性约束、避撞空间约束、转向执行机构约束、边值约束构建规划约束条件从而得到最优轨迹,本发明基于最优控制理论,综合了非线性车辆动力学模型、稳定域信息和环境信息,并考虑车辆转向执行机构的饱和限制,最终能够得到满足优化目标的安全、稳定的避撞轨迹。
交易流程
安全保障
热点资讯
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
朝阳·龙城科创网 版权所有 辽ICP备2022008453号-1
Copyright © 2020 www.lckc.cn