首页
产学研联盟“揭榜挂帅”
离岸创新中心
成果转化交易
产业引导基金
政策支持兑现
闲置资产交易
区间战略合作
智能制造
专利成果展示
平台首页
>
成果转化交易
>
专利成果展示
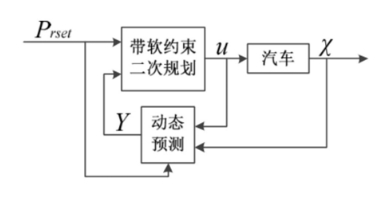
一种基于软约束二次规划MPC的无人驾驶车辆路径跟踪控制方法
行业领域:其他
需求类别:技术需求
法律状态:已下证
发布时间:2024-01-12
详情介绍
本发明涉及一种基于软约束二次规划MPC的无人驾驶车辆路径跟踪控制方法,该方法首先根据已知的参考路径点计算并建立新的参考路径点集P
rset
,然后预测从第k采样时刻起到未来Np个采样时刻的输出,之后利用带软约束二次规划优化方法计算出未来N
c
个采样时刻的控制增量,进而求得当前时刻的控制量,将当前时刻控制量作用于系统,如此循环直至路径跟踪结束。本方法通过滚动优化策略,以局部优化代替全局优化,利用实测信息进行反馈校正,可以在控制过程中实时调整控制参数,路径跟踪更加精确。
交易流程
安全保障
热点资讯
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
朝阳·龙城科创网 版权所有 辽ICP备2022008453号-1
Copyright © 2020 www.lckc.cn