首页
产学研联盟“揭榜挂帅”
离岸创新中心
成果转化交易
产业引导基金
政策支持兑现
闲置资产交易
区间战略合作
智能制造
专利成果展示
平台首页
>
成果转化交易
>
专利成果展示
一种复杂环境下智能行走机器人自主导航改进方法
行业领域:机械制造
需求类别:设备需求
法律状态:未下证
发布时间:2024-03-25
详情介绍
本申请对智能行走机器人在复杂环境下的自主导航方法进行优化,提出的解决方案不仅能实现稳定高效的机器人自主导航,对于移动平台在复杂环境的精确作业也大有帮助,同时有助力机器人向强人工智能的方向发展,主要包括:搭建基于ROS的智能行走机器人平台,改进智能行走机器人狭小空间白主导航方法,改进智能行走机器人在高动态障碍环境下的导航避障方法。通过加入优势方向调度协调并在机器人进行局部路线规划前独立运动,寻找更宽裕的操作空间来优化机器人的自主导航,优化操作有利于提高机器人自主移动能力和鲁棒性,实现复杂环境下的高效导航与避障,具备更高效稳定的自主导航能力,其运动智能型得以大幅提高。
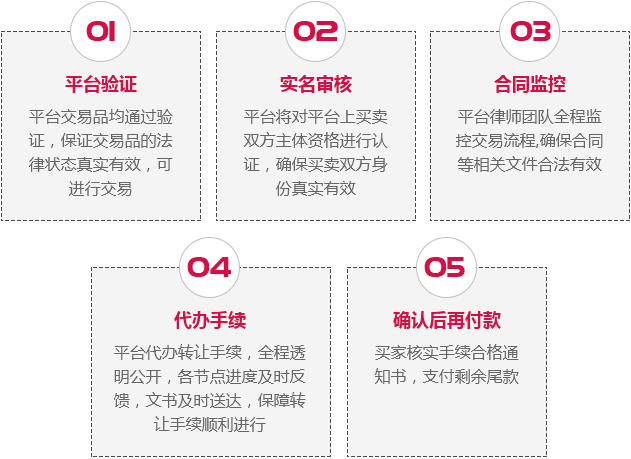
交易流程
安全保障
热点资讯
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
朝阳·龙城科创网 版权所有 辽ICP备2022008453号-1
Copyright © 2020 www.lckc.cn