首页
产学研联盟“揭榜挂帅”
离岸创新中心
成果转化交易
产业引导基金
政策支持兑现
闲置资产交易
区间战略合作
智能制造
科技成果展示
平台首页
>
成果转化交易
>
科技成果展示
基于人工牵引力控制的机器人辅助装配技术
行业领域:其他
需求类别:技术需求
技术来源:研究机构
发布时间:2024-01-24
详情介绍
系统由工业机器人、移动平台、工控机、末端执行器、六维力传感器、双目视
觉传感器等组成。首先通过双目视觉传感器实现产品相对于机器人的相对位置关系
测量,然后进行无碰撞机器人轨迹规划、仿真和离线编程,并引导机器人运行至装
配位置。通过人工牵引力控制,实现被装配部件的局部调整和定位,最终完成机器
人辅助装配过程。该项技术己经在多家航天生产企业获得了工程应用。
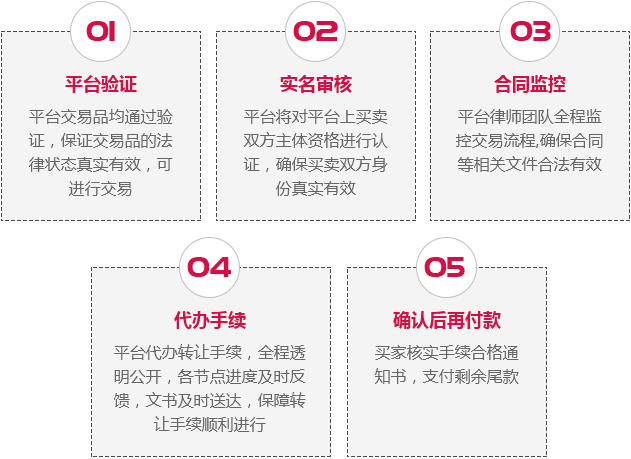
交易流程
安全保障
热点资讯
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
朝阳·龙城科创网 版权所有 辽ICP备2022008453号-1
Copyright © 2020 www.lckc.cn